
Memahami PID Controller: Otak di Balik Sistem Kontrol Otomatis Modern
- Atista Dwi zahra
- Dec 23, 2025
- 6 min read


Pernahkah kamu bertanya-tanya bagaimana robot bisa bergerak dengan presisi tinggi, atau bagaimana sistem pemanas ruangan bisa menjaga suhu tetap stabil? Di balik semua kehebatan teknologi tersebut, ada satu komponen yang bekerja tanpa lelah, yaitu PID Controller. Meskipun namanya terdengar teknis dan rumit, konsep dasarnya sebenarnya cukup sederhana untuk dipahami.
Bayangkan kamu sedang mengendarai mobil dan ingin menjaga kecepatan tetap 60 km/jam. Ketika kecepatan turun, kamu menginjak gas lebih dalam. Ketika terlalu cepat, kamu mengendurkan pedal gas. Itulah sebenarnya cara kerja PID Controller hanya saja dilakukan secara otomatis dan jauh lebih presisi daripada kemampuan manusia.
Apa Sebenarnya PID Controller Itu?
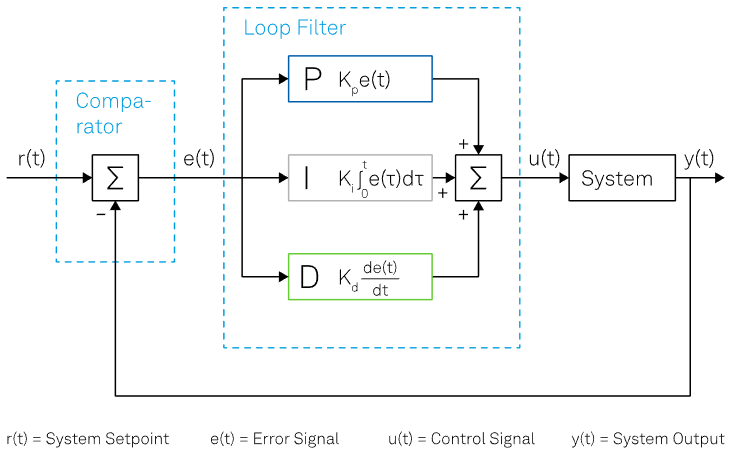
PID Controller adalah sistem kontrol berbasis umpan balik yang digunakan untuk mengatur dan mempertahankan nilai tertentu dalam sebuah proses. Nama PID sendiri merupakan singkatan dari tiga komponen utamanya yaitu Proportional (P), Integral (I), dan Derivative (D). Ketiga komponen ini bekerja sama seperti sebuah tim yang solid untuk mencapai tujuan yang sama.
Dalam dunia industri, PID Controller telah menjadi pilihan utama sejak tahun 1930-an. Menurut survei yang dilakukan Honeywell pada tahun 2000, sebanyak 97% industri proses mulai dari industri kimia, makanan, hingga minyak dan gas menggunakan PID sebagai komponen utama dalam sistem kontrolnya. Kepopuleran ini bukan tanpa alasan. Kesederhanaan struktur dan kemudahan dalam melakukan tuning parameter membuat PID Controller tetap relevan hingga saat ini, bahkan di era digital yang serba canggih.
Yang menarik, PID Controller tidak hanya terbatas pada penggunaan industri besar. Teknologi ini juga hadir dalam kehidupan sehari-hari kita, dari AC yang menjaga suhu ruangan, cruise control pada mobil, hingga drone yang bisa terbang stabil di udara. Semua sistem ini mengandalkan prinsip yang sama: membaca kondisi saat ini, membandingkannya dengan target yang diinginkan, lalu melakukan penyesuaian untuk mencapai target tersebut.
Peran PID dalam Sistem Kontrol Otomatis
Dalam sistem kontrol otomatis, PID Controller berperan sebagai "otak" yang mengambil keputusan. Tugas utamanya adalah menerima informasi dari sensor, membandingkan dengan nilai target (setpoint), menghitung selisihnya (error), dan mengeluarkan sinyal kontrol yang tepat untuk menggerakkan aktuator. Proses ini terjadi dalam loop tertutup yang berulang secara kontinyu. Sistem membaca nilai sensor, PID Controller menghitung output yang diperlukan, aktuator merespon dengan mengubah kondisi sistem, dan siklus ini terus berulang.
Kecepatan loop ini sangat penting dalam aplikasi robotika modern, PID Controller bisa melakukan perhitungan ini hingga 50 kali per detik (setiap 20 milidetik). Keunggulan utama PID adalah kemampuannya untuk beradaptasi dengan perubahan kondisi. Jika terjadi gangguan atau perubahan beban, PID akan secara otomatis menyesuaikan outputnya untuk tetap menjaga sistem pada target yang diinginkan.
Inilah yang membedakan sistem kontrol loop tertutup dengan sistem kontrol sederhana berbasis timer atau open-loop yang tidak memiliki mekanisme umpan balik. Dalam konteks robotika, seperti yang dijelaskan dalam dokumentasi WPILib untuk kompetisi robotika FIRST, PID Controller menjadi solusi untuk tantangan umum. bagaimana membuat robot bergerak cepat namun berhenti tepat di posisi yang diinginkan. Masalah serupa juga muncul saat mengontrol lengan robot, elevator, atau sistem motorik lain yang membutuhkan gerakan presisi.

Fungsi Masing-Masing Komponen: P, I, dan D
Proportional (P)
adalah komponen yang paling intuitif. Ia bekerja seperti pegas semakin jauh sistem dari target, semakin besar gaya yang diberikan untuk menariknya kembali. Dalam formula fisika pegas (F = -kx), konstanta k adalah gain proportional (Kp) yang menentukan seberapa kuat "tarikan" tersebut. Jika Kp terlalu kecil, sistem akan bergerak lambat menuju target. Jika terlalu besar, sistem akan berosilasi atau bahkan menjadi tidak stabil. Komponen P ini merespons error saat ini. Misalnya, jika target suhu adalah 25°C dan suhu saat ini 20°C, maka error-nya adalah 5°C. Dengan Kp = 2, output kontrolnya adalah 10 unit. Semakin besar error, semakin besar pula output yang dihasilkan.
Integral (I)
bekerja dengan cara yang berbeda. Komponen ini mengakumulasi error dari waktu ke waktu. Bayangkan seperti mengisi ember dengan air semakin lama ada error, semakin penuh embernya, dan semakin besar output yang dihasilkan. Fungsi utama komponen I adalah menghilangkan error steady-state, yaitu error kecil yang bertahan dalam waktu lama. Namun, penggunaan komponen I harus hati-hati. Jika gain integral (Ki) terlalu besar, bisa terjadi "integral windup" kondisi di mana akumulasi error menjadi terlalu besar dan menyebabkan overshoot yang berlebihan. Dalam praktiknya, banyak sistem modern lebih memilih menggunakan feedforward control dibandingkan mengandalkan komponen I untuk mengatasi steady-state error.
Derivative (D)
adalah komponen yang paling "pintar" karena ia memprediksi masa depan berdasarkan tren saat ini. Komponen ini melihat seberapa cepat error berubah dan memberikan output yang proporsional terhadap laju perubahan tersebut. Jika sistem bergerak terlalu cepat menuju target, komponen D akan "mengerem" untuk mencegah overshoot. Dalam istilah teknis, komponen D menghasilkan damping effect seperti shock absorber pada mobil yang meredam getaran. Namun, komponen D juga sensitif terhadap noise pada sensor. Jika sinyal sensor berfluktuasi, komponen D bisa menghasilkan output yang tidak stabil atau "jitter".
Implementasi PID Controller dalam Kehidupan Nyata
Robotika
Dalam kompetisi robotika FIRST, PID Controller digunakan untuk mengontrol berbagai aspek robot. Salah satu implementasi yang umum adalah untuk mengontrol sudut putaran drivetrain (sistem penggerak robot). Sistem menggunakan gyroscope untuk mengukur sudut saat ini, membandingkannya dengan sudut target, dan menggunakan ProfiledPIDController untuk menghasilkan motion profile yang smooth.
Hasilnya, robot bisa berputar ke sudut yang diinginkan dengan presisi tinggi tanpa overshoot. Contoh lain adalah pada shooter flywheel roda yang berputar untuk menembakkan bola. PID Controller mengatur kecepatan putaran flywheel agar mencapai kecepatan target sebelum menembak. Kombinasi PID dengan feedforward control menghasilkan akurasi tembakan yang sangat tinggi.
Kontrol Suhu
Di industri makanan atau kimia, menjaga suhu proses sangat krusial. PID Controller menerima input dari sensor suhu (seperti thermocouple atau RTD), membandingkan dengan setpoint yang diinginkan, dan mengatur power ke elemen pemanas atau katup pendingin. Hasilnya, suhu bisa dijaga stabil dalam rentang yang sangat sempit, bahkan ketika ada perubahan beban atau gangguan eksternal.
Motor DC
PID Controller sering dipakai untuk mengontrol kecepatan atau posisi motor DC. Encoder dipasang pada shaft motor untuk mengukur kecepatan atau posisi aktual. PID kemudian menghasilkan sinyal PWM (Pulse Width Modulation) yang mengatur voltase ke motor. Dalam penelitian yang dipublikasikan di jurnal TELKA, implementasi PID pada motor DC dengan tuning menggunakan algoritma genetik berhasil menghasilkan overshoot kurang dari 10% hasil yang sangat baik untuk aplikasi kontrol motor.

Tantangan dalam Tuning Parameter PID Controller
Trial and Error
Metode tuning yang paling umum adalah trial and error atau coba-coba. Engineer mencoba berbagai kombinasi nilai Kp, Ki, dan Kd sambil mengamati respons sistem. Masalahnya, metode ini sangat memakan waktu dan hasilnya sangat bergantung pada pengalaman dan intuisi engineer. Untuk sistem yang kompleks, bisa membutuhkan berhari-hari atau bahkan berminggu-minggu untuk mendapatkan nilai yang optimal. Lebih buruk lagi, nilai yang tampak optimal pada satu kondisi operasi belum tentu optimal pada kondisi lain. Perubahan beban, suhu, atau faktor lingkungan lainnya bisa membuat sistem yang sudah di-tune dengan baik menjadi tidak stabil.
Metode Ziegler-Nichols
Untuk mengatasi masalah trial and error, dikembangkan metode sistematis seperti Ziegler-Nichols. Metode ini memberikan panduan langkah-demi-langkah untuk menentukan nilai PID. Meskipun lebih terstruktur, hasil dari metode Ziegler-Nichols sering kali hanya memberikan starting point yang masih perlu fine-tuning lebih lanjut.
Trade-off antar Parameter
Setiap parameter PID memiliki efek yang saling mempengaruhi. Menambah Kp bisa mempercepat respons tapi juga meningkatkan overshoot. Menambah Kd bisa mengurangi overshoot tapi membuat sistem lebih sensitif terhadap noise. Menemukan keseimbangan yang tepat antara rise time, settling time, overshoot, dan steady-state error membutuhkan pemahaman mendalam tentang karakteristik sistem.
Solusi Modern
Untuk mengatasi tantangan tuning, peneliti mengembangkan metode otomatis menggunakan algoritma cerdas. Algoritma Genetik (Genetic Algorithm) adalah salah satu metode yang terbukti efektif. Algoritma ini terinspirasi dari proses seleksi alam mencoba berbagai kombinasi parameter, mengevaluasi hasilnya, dan mengevolusi kombinasi terbaik dari generasi ke generasi. Penelitian oleh Suseno, Ma'arif, dan Puriyanto menunjukkan bahwa penggunaan Algoritma Genetik untuk tuning PID pada motor DC memberikan hasil yang jauh lebih baik dibanding metode trial and error konvensional. Setiap iterasi menghasilkan improvement, dan pada akhirnya menghasilkan overshoot minimal dengan settling time yang optimal.
PID: Teknologi Sederhana yang Menggerakkan Dunia Modern
PID Controller memang terdengar teknis, tapi sebenarnya cara kerjanya cukup masuk akal mirip seperti cara kita mengatur kecepatan mobil atau menjaga keseimbangan saat bersepeda. Tiga komponen P, I, dan D bekerja sama untuk membuat sistem bisa mencapai target dengan presisi tinggi. Yang membuat PID tetap populer hingga sekarang adalah kesederhanaannya. Tidak perlu matematika rumit atau komputer super canggih untuk mengimplementasikannya.
Meski begitu, tantangan terbesar tetap ada pada proses tuning menemukan nilai parameter yang pas memang butuh kesabaran dan pengalaman. Untungnya, sekarang ada metode otomatis seperti algoritma genetik yang bisa membantu. Dari robot kompetisi hingga sistem pemanas di pabrik, PID ada di mana-mana, bekerja diam-diam di balik layar. Bagi siapa saja yang tertarik di dunia otomasi dan robotika, memahami PID adalah fondasi penting yang akan sangat berguna ke depannya. Semoga bermanfaat dan selamat berkarya!
PT. Karya Merapi Teknologi
Follow sosial media kami dan ambil bagian dalam berkarya untuk negeri!
Instagram: https://www.instagram.com/kmtek.indonesia/
Facebook: https://www.facebook.com/kmtech.id
LinkedIn: https://www.linkedin.com/company/kmtek
Sumber:


Comments