
Pengantar PID Controller: Teori, Implementasi, dan Simulasi Arduino
- Atista Dwi zahra
- Sep 9, 2025
- 4 min read

Definisi dan Konsep Dasar PID Controller
Kontroler PID (Proportional-Integral-Derivative) merupakan salah satu sistem kendali yang paling fundamental dan banyak digunakan dalam dunia industri. PID controller adalah instrumen yang menerima data input dari sensor, menghitung perbedaan antara nilai aktual dan setpoint yang diinginkan, serta menyesuaikan output untuk mengontrol variabel seperti suhu, laju alir, kecepatan, tekanan, dan tegangan.
Sistem kendali adalah suatu sistem yang dapat mengendalikan, memerintah, dan mengatur keadaan dari respon output agar mencapai suatu kondisi yang diinginkan. Dalam implementasinya, PID bekerja dalam sistem closed loop atau tertutup, di mana output sistem memberikan umpan balik yang digunakan untuk melakukan koreksi berkelanjutan.
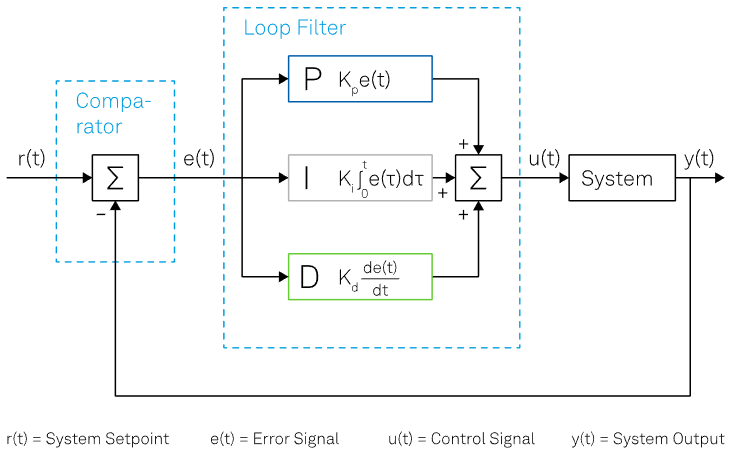
Keunggulan utama sistem PID terletak pada kemampuannya menggabungkan tiga mekanisme kontrol yang berbeda: kontrol proporsional yang bereaksi terhadap error saat ini, kontrol integral yang mengatasi akumulasi error masa lalu, dan kontrol derivatif yang memprediksi error di masa depan.
Sistem Open Loop vs Closed Loop
Pemahaman tentang perbedaan sistem open loop dan closed loop sangat penting dalam memahami mengapa PID controller diperlukan. Pada sistem open loop, output sistem hanya bergantung pada sinyal inputnya. Sinyal output tidak memiliki pengaruh terhadap proses kontrol sistem. Sistem ini memiliki kelemahan utama yaitu tidak dapat melakukan koreksi ketika terjadi gangguan atau disturbansi.
Sebaliknya, sistem closed loop memiliki mekanisme feedback yang memungkinkan sistem melakukan self-correction. Sistem close loop dapat mengukur penyimpangan atau perbedaan antara output yang diinginkan (setpoint) terhadap output saat ini yang disebut galat atau sinyal error. Error inilah yang kemudian diproses oleh kontroler PID untuk menghasilkan sinyal kontrol yang tepat.
Komponen PID Controller: P, I, dan D
Komponen Proportional (P)
Komponen proporsional hanya bergantung pada perbedaan antara setpoint dan variabel proses. Perbedaan ini disebut sebagai Error term. Proportional gain (Kc) menentukan rasio respons output terhadap sinyal error. Meningkatkan gain proporsional akan mempercepat respons sistem, namun jika terlalu besar dapat menyebabkan osilasi.
Komponen Integral (I)
Komponen integral menjumlahkan error term sepanjang waktu. Hasilnya adalah bahkan error kecil pun akan menyebabkan komponen integral meningkat perlahan. Respons integral akan terus meningkat sepanjang waktu kecuali error bernilai nol, sehingga efeknya adalah menghilangkan steady-state error. Komponen ini menyelesaikan masalah kontroler proporsional dengan mengeliminasi error steady state.
Komponen Derivative (D)
Komponen derivatif menyebabkan output menurun jika variabel proses meningkat dengan cepat. Respons derivatif proporsional dengan laju perubahan variabel proses. Komponen ini dapat meningkatkan stabilitas sistem dan mempercepat respons transien, namun sangat sensitif terhadap noise.

Aplikasi dalam Industri
PID controller memiliki aplikasi yang sangat luas dalam berbagai industri. Berdasarkan referensi akademis dari UNDIP, hampir 95% dari total sistem kontroler close loop di dunia industri menggunakan kontroler PID.
Kontrol Temperatur: Sistem HVAC, oven industri, dan reaktor kimia
Kontrol Tekanan: Sistem pneumatik dan hidraulik
Kontrol Kecepatan: Motor DC dan AC, conveyor belt
Kontrol Posisi: Robot industri, sistem CNC, actuator
Kontrol Level: Tangki penyimpanan dan sistem distribusi cairan
Keberhasilan PID dalam industri disebabkan oleh fleksibilitasnya yang memungkinkan penyesuaian parameter untuk berbagai jenis sistem dan proses.
Implementasi PID Controller pada Arduino
Dalam era digitalisasi, implementasi PID controller menggunakan mikrokontroler seperti Arduino menjadi sangat populer. Kontroler PID pada bagian pembahasan sebelumnya dilakukan pada domain analog yang memiliki waktu yang kontinu. Namun, ketika berhubungan dengan mikrokontroler, setiap instruksi dieksekusi dalam waktu beberapa clock cycle pada CPU.
Prinsip Kerja Digital PID
Pada setiap iterasi, Arduino akan melakukan sampling terhadap output dari sistem, melakukan komputasi output dari kontroler PID sebagai Actuating Signal, lalu memberikan Actuating Signal tersebut sebagai input dari rangkaian. Jeda waktu antara pengambilan sinyal output disebut dengan Sampling Time.
Tahapan Implementasi
a. Pembacaan Sensor: Mikrokontroler membaca nilai dari sensor menggunakan ADC (Analog to Digital Converter)
b. Perhitungan Error: Menghitung selisih antara setpoint dan nilai aktual yang terbaca
c. Komputasi PID: Menghitung output kontroler berdasarkan komponen P, I, dan D
d. Output ke Aktuator: Mengirimkan sinyal kontrol melalui DAC atau PWM
3. Pertimbangan Teknis
Semakin kecil sampling time, semakin mirip sistem kontroler PID digital dengan sistem kendali analog yang ideal. Namun, penurunan sampling time akan meningkatkan banyaknya proses komputasi yang dilakukan mikrokontroler. Implementasi yang baik memerlukan keseimbangan antara akurasi kontrol dan beban komputasi.

Simulasi dan Tuning PID
Proses tuning atau penyesuaian parameter PID merupakan tahap kritis dalam implementasi. Proses pengaturan gain optimal untuk P, I dan D untuk mendapatkan respons ideal dari sistem kontrol disebut tuning.
Metode Trial and Error
Gain dari kontroler PID dapat diperoleh dengan metode trial and error. Dalam metode ini, term I dan D diatur ke nol terlebih dahulu dan proportional gain ditingkatkan hingga output loop berosilasi.
Metode Ziegler-Nichols
Metode sistematis yang menggunakan parameter kritical gain (Kc) dan periode osilasi (Pc) untuk menentukan nilai parameter PID yang optimal. Dalam simulasi Arduino, pengguna dapat mengubah setting simulasi melalui interface yang sudah disediakan, melakukan simulasi, mengubah setting simulasi, lalu menjalankan kembali simulasi dalam rentang waktu yang singkat. Hal ini memungkinkan eksperimen cepat untuk memahami efek setiap parameter terhadap respons sistem.
Masa Depan dan Pengembangan Lanjutan
Teknologi PID controller terus berkembang seiring dengan kemajuan teknologi digital dan komputasi. Implementasi pada platform seperti Arduino tidak hanya memudahkan proses pembelajaran, tetapi juga membuka kemungkinan integrasi dengan teknologi Internet of Things (IoT) dan sistem monitoring jarak jauh.
Pengembangan lebih lanjut dapat melibatkan penambahan algoritma adaptive tuning yang secara otomatis menyesuaikan parameter PID berdasarkan kondisi operasi yang berubah. Selain itu, kombinasi dengan machine learning dapat menghasilkan sistem kontrol yang lebih cerdas dan responsif terhadap perubahan lingkungan.
Dalam konteks industri modern, PID controller yang diintegrasikan dengan sistem digital memungkinkan pengumpulan data real-time yang dapat dianalisis untuk predictive maintenance dan optimasi proses. Hal ini menunjukkan bahwa meskipun konsep dasar PID sudah berusia puluhan tahun, aplikasi dan pengembangannya masih sangat relevan dalam mendukung transformasi digital industri. Semoga bermanfaat dan selamat berkarya!
PT. Karya Merapi Teknologi
Follow sosial media kami dan ambil bagian dalam berkarya untuk negeri!
Instagram: https://www.instagram.com/kmtek.indonesia/
Facebook: https://www.facebook.com/kmtech.id
LinkedIn: https://www.linkedin.com/company/kmtek
Sumber :

Comments