
Mengenal PID Controller dalam Sistem Kontrol Otomatis Industri
- Atista Dwi zahra
- Nov 21, 2025
- 5 min read


Pernahkah kamu bertanya-tanya bagaimana sebuah oven industri bisa menjaga suhu tetap stabil di 180°C? Atau bagaimana drone mampu terbang dengan keseimbangan sempurna meski diterpa angin? Jawabannya terletak pada teknologi kontrol yang sudah digunakan sejak tahun 1930-an, yaitu PID Controller. Sistem kontrol ini menjadi tulang punggung otomasi industri modern, dari pabrik kimia hingga kendaraan otonom.
Apa Itu PID Controller dan Mengapa Penting?
PID Controller merupakan singkatan dari Proportional-Integral-Derivative Controller, sebuah mekanisme kontrol otomatis yang dirancang untuk menjaga variabel proses tetap berada pada nilai yang diinginkan. Menurut survey Honeywell tahun 2000, sekitar 97% industri yang bergerak dalam bidang proses seperti industri kimia, pulp, makanan, minyak dan gas menggunakan PID sebagai komponen utama dalam pengontrolan mereka. Bayangkan kamu sedang menyetir mobil di jalan tol dan ingin mempertahankan kecepatan 100 km/jam. Saat kecepatan turun, kamu menekan gas lebih dalam.
Saat terlalu cepat, kamu mengurangi tekanan pedal. Itulah prinsip dasar PID bekerja terus menerus menyesuaikan output berdasarkan selisih antara kondisi saat ini dengan target yang diinginkan. Popularitas PID dalam industri dilatarbelakangi terutama oleh kesederhanaan struktur serta kemudahan dalam melakukan tuning parameter kontrolnya. Seorang operator tidak dituntut menguasai matematika yang rumit, melainkan hanya dibutuhkan pengalaman lapangan serta sedikit pengetahuan teori kontrol dasar.
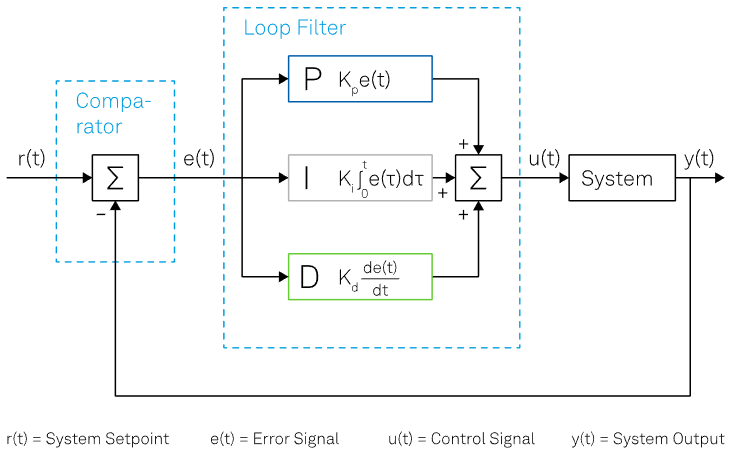
Cara Kerja PID Controller: Tiga Komponen yang Bekerja Harmonis
Kekuatan PID terletak pada kombinasi tiga komponen yang bekerja secara bersamaan. Untuk memahaminya dengan lebih mudah, mari kita gunakan analogi memasak air dengan kompor listrik dimana kita ingin suhu air tetap di 90°C.
1. Proportional (P) - Respons Cepat Terhadap Error
Komponen Proportional menghasilkan output kontrol yang sebanding dengan besarnya error atau selisih antara setpoint dengan nilai aktual. Saat kamu menyalakan kompor dan suhu air masih jauh dari 90°C, komponen P akan langsung menaikkan daya secara cepat agar suhu segera naik. Semakin besar selisihnya, semakin kuat pula respons yang diberikan. Rumusnya sederhana: Output P = Kp × Error Di mana Kp adalah konstanta penguatan proporsional. Namun, jika hanya menggunakan P saja, sistem akan mengalami "steady-state error" atau error tetap yang tidak bisa dihilangkan sempurna.
2. Integral (I) - Menghilangkan Error yang Tersisa
Setelah suhu mulai mendekati 90°C namun belum mencapainya, komponen Integral mulai bekerja. Komponen I mengakumulasi error dari waktu ke waktu dan menambahkan daya sedikit demi sedikit agar suhu benar-benar mencapai 90°C tanpa tertinggal. Inilah yang membedakan sistem PI dari sistem P biasa kemampuan mencapai setpoint dengan sempurna. Output I = Ki × ∑Error Konstanta Ki mengatur seberapa cepat akumulasi error mempengaruhi output kontrol. Komponen ini sangat penting untuk menghilangkan offset yang tidak bisa diatasi oleh P saja.
3. Derivative (D) - Antisipasi Perubahan Cepat
Jika suhu naik terlalu cepat dan berisiko melewati 90°C (overshoot), komponen Derivative akan bereaksi dengan mengurangi laju pemanasan untuk mencegah overshoot tersebut. D bekerja berdasarkan laju perubahan error, bukan besar error itu sendiri. Komponen ini membantu meredam osilasi dan membuat sistem lebih stabil. Output D = Kd × d(Error)/dt Dengan ketiga komponen tersebut bekerja bersama, suhu air bisa dikontrol agar tetap stabil di 90°C tanpa naik turun secara ekstrem. Formula lengkap PID adalah: Output = (Kp × Error) + (Ki × ∑Error) + (Kd × d(Error)/dt).

Model Proses dalam Sistem PID Controller
Dalam dunia industri, pemahaman terhadap model proses yang akan dikontrol sangat penting untuk keberhasilan tuning parameter PID. Secara umum, proses industri dapat dikategorikan menjadi dua model matematis utama, yaitu model Self Regulating Process dan model Non Self Regulating Process.
Model Self Regulating Process adalah model proses yang bersifat stabil dan dapat didekati dengan model matematis FOPDT (First Order Plus Dead Time). Model ini dicirikan oleh tiga parameter penting: keterlambatan transportasi proses (L), konstanta waktu proses (T), dan gain statis proses (K). Contoh nyata dari model ini adalah pengontrolan temperature pada sistem heat exchanger.
Untuk mengidentifikasi parameter-parameter proses tersebut, operator dapat melakukan eksperimen sederhana yang disebut Bump Test. Eksperimen ini dilakukan dengan memberi perubahan tangga pada sinyal output kontroler saat proses telah mencapai keadaan steady, kemudian mengamati respon variabel output proses. Dari grafik respon yang dihasilkan, ketiga parameter dapat dihitung dan digunakan untuk menentukan setting parameter PID yang optimal.
Sementara itu, model Non Self Regulating Process seperti model IPDT (Integrating Plus Dead Time) menunjukkan karakteristik yang tidak stabil. Salah satu contoh praktisnya adalah pengontrolan level fluida pada tangki dengan menggunakan pompa penghisap. Untuk model ini, hubungan input-output hanya dicirikan oleh dua parameter: keterlambatan transportasi proses (L) dan gain integratif proses (K*).
Penerapan PID Controller dalam Berbagai Bidang
PID Controller bukan hanya teori di buku teks. Teknologi ini bekerja di sekitar kita setiap hari, dari perangkat rumah tangga hingga sistem industri yang kompleks.
Industri Manufaktur dan Proses
Di pabrik pengolahan makanan, PID digunakan untuk menjaga suhu oven tepat pada 180°C selama proses pengeringan produk. Sensor suhu seperti termokopel membaca nilai aktual secara kontinyu, dan kontroler menyesuaikan arus listrik ke elemen pemanas. Hasilnya, suhu bertahan stabil dan produk dikeringkan dengan kualitas konsisten sambil menghemat energi.
Sistem AC dan Kontrol Suhu Ruangan
Air conditioner modern menggunakan kontroler PI untuk menjaga suhu ruangan tetap nyaman. Saat suhu berubah akibat kondisi luar atau aktivitas di dalam ruangan, sistem akan menyesuaikan kerja kompresor secara otomatis untuk mencapai setpoint yang telah ditentukan.
Drone dan Robot Otonom
Pada drone, PID bekerja pada berbagai loop kontrol sekaligus menjaga ketinggian, sudut kemiringan, dan posisi horizontal. Setiap motor pada drone dikendalikan secara independen untuk menghasilkan gerakan yang stabil meski diterpa gangguan eksternal seperti angin.
Kendaraan Otonom
Mobil self-driving menggunakan PID untuk mengontrol kecepatan, jarak aman, dan posisi mobil dengan akurat. Fitur Adaptive Cruise Control misalnya, menggunakan PID untuk menjaga jarak konstan dengan kendaraan di depan sambil menyesuaikan kecepatan secara halus.
Sistem Irigasi Pertanian Cerdas
Di pertanian modern, PID mengatur debit air berdasarkan pembacaan kelembapan tanah secara real-time. Sistem ini memastikan tanaman mendapat air yang cukup tanpa pemborosan, meningkatkan efisiensi penggunaan air hingga 40%.

Keuntungan Menggunakan PID Controller
Mengapa PID begitu populer di industri? Ada beberapa keunggulan yang membuatnya menjadi pilihan utama para engineer dan operator lapangan. Pertama, kesederhanaan implementasi. PID mudah dipahami dan diimplementasikan baik dalam hardware maupun software. Tidak seperti metode kontrol modern yang memerlukan komputasi kompleks, PID dapat berjalan bahkan pada mikrokontroler sederhana seperti Arduino atau ESP32.
Kedua, efektivitas untuk berbagai sistem. Dari sistem sederhana seperti kontrol suhu rumah kaca hingga sistem kompleks seperti reaktor kimia, PID terbukti efektif menangani berbagai karakteristik proses. Ketiga, parameter yang dapat disesuaikan. Nilai Kp, Ki, dan Kd dapat diatur sesuai kebutuhan spesifik setiap aplikasi. Bahkan dalam satu sistem, parameter dapat diubah saat kondisi operasi berubah melalui teknik seperti Gain Scheduling.
Keempat, respons real-time yang cepat. PID mampu memberikan koreksi dalam hitungan milidetik, sangat penting untuk aplikasi yang memerlukan kontrol presisi tinggi seperti mesin CNC atau sistem penerbangan. Kelima, keandalan tinggi. Sejarah panjang penggunaan PID di industri membuktikan keandalannya. Modul PID komersial modern seperti DCS atau PLC juga telah dilengkapi fitur-fitur pendukung seperti Anti-Windup dan Bumpless Transfer yang meningkatkan performanya.
Simulasi PID Controller untuk Pembelajaran
Bagi siapa pun yang ingin memahami lebih dalam cara kerja PID, simulasi merupakan tools pembelajaran yang sangat berharga. Dengan simulator, kita bisa bereksperimen dengan parameter Kp, Ki, dan Kd tanpa risiko merusak peralatan atau mengganggu proses produksi. Simulator PID online memungkinkan kita mengamati secara visual bagaimana perubahan setiap parameter mempengaruhi respons sistem. Misalnya, saat kita menaikkan nilai Kp, sistem akan merespons lebih cepat tetapi cenderung overshoot.
Menambahkan Ki akan menghilangkan steady-state error namun bisa menyebabkan sistem menjadi lambat. Sedangkan Kd membantu meredam osilasi dan membuat transisi lebih halus. Platform seperti simulator web interaktif menyediakan slider untuk mengatur parameter Kp, Ki, dan Kd secara real-time. Kita bisa mengamati respons sistem terhadap first-order plant dengan delay, yang mewakili perilaku tipikal banyak aplikasi industri dan teknik.
Software simulasi seperti MATLAB Simulink, Proteus, atau Python dengan library control juga memberikan fleksibilitas lebih untuk memodelkan sistem yang lebih kompleks. Bagi mahasiswa atau praktisi yang tidak dapat mengakses proses nyata secara langsung, simulasi komputer menjadi sarana praktis untuk mempelajari dan mempraktikkan materi kontrol PID. Dengan bereksperimen pada berbagai skenario dan parameter, pemahaman intuitif tentang perilaku sistem kontrol akan terbentuk dengan lebih baik. Semoga bermanfaat dan selamat berkarya!
PT. Karya Merapi Teknologi
Follow sosial media kami dan ambil bagian dalam berkarya untuk negeri!
Instagram: https://www.instagram.com/kmtek.indonesia/
Facebook: https://www.facebook.com/kmtech.id
LinkedIn: https://www.linkedin.com/company/kmtek
Sumber:
https://eprints.undip.ac.id/52898/1/buku_Kontrol_PID_untuk_Proses_Industri_Lengkap-Iwan_Setiawan.pdf
Comments