
Memahami Cara Kerja PID dalam Sistem Kontrol: Panduan Lengkap untuk Pemula
- Atista Dwi zahra
- Dec 24, 2025
- 6 min read


Sistem kontrol otomatis telah menjadi tulang punggung berbagai industri modern, mulai dari pabrik kimia, manufaktur, hingga sistem robotika. Di balik semua otomasi canggih tersebut, terdapat satu metode kontrol yang telah terbukti efektif selama puluhan tahun: kontroler Proportional-Integral-Derivative atau yang lebih dikenal dengan PID. Meski terdengar teknis, konsep PID sebenarnya cukup mudah dipahami bahkan untuk orang awam.
Apa Itu Sistem Kontrol PID?
Kontroler PID adalah sistem pengendali yang dirancang untuk menjaga suatu parameter proses tetap berada pada nilai yang diinginkan (setpoint). Bayangkan kamu sedang mengendarai mobil dengan cruise control, sistem tersebut secara otomatis mengatur kecepatan mobil agar tetap konstan meskipun jalan menanjak atau menurun. Itulah contoh sederhana penerapan PID dalam kehidupan sehari-hari.
Dalam dunia industri, PID digunakan untuk mengontrol berbagai parameter seperti suhu, tekanan, level cairan, kecepatan motor, dan masih banyak lagi. Yang membuat PID istimewa adalah kemampuannya untuk bekerja tanpa perlu memahami detail rumit dari sistem yang dikontrol. PID hanya membutuhkan informasi tentang perbedaan antara nilai yang diinginkan dengan nilai aktual (disebut error), lalu melakukan penyesuaian untuk meminimalkan error tersebut.
Tiga Komponen Penting dalam PID
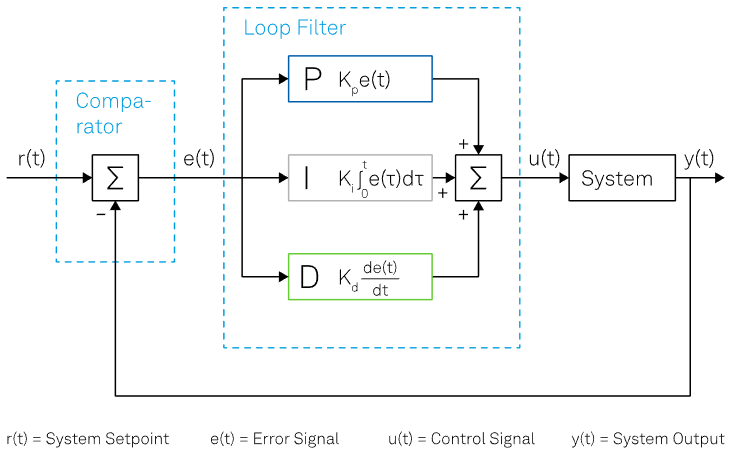
PID controller terdiri dari tiga elemen kendali yang bekerja bersama-sama, yaitu Proporsional (P), Integral (I), dan Derivative (D). Ketiga komponen ini dapat dianalogikan seperti tiga orang yang bekerja sama mengemudikan sebuah kendaraan dengan gaya dan fokus yang berbeda.
Kontrol Proporsional (P): Respons Cepat terhadap Error
Komponen proporsional adalah yang paling sederhana dan paling intuitif. Kontrol P bekerja dengan cara memberikan respons yang sebanding dengan besarnya error saat ini. Semakin besar perbedaan antara nilai yang diinginkan dengan nilai aktual, semakin besar pula aksi kontrol yang diberikan. Sebagai contoh, bayangkan kamu mengatur suhu ruangan menggunakan AC. Jika suhu ruangan 30°C sementara yang kamu inginkan adalah 25°C (error 5°C), kontrol P akan memberikan pendinginan yang lebih kuat dibandingkan jika errornya hanya 1°C.
Secara matematis, output kontrol proporsional dapat ditulis sebagai: P = Kp × e(t), di mana Kp adalah konstanta proporsional dan e(t) adalah error pada waktu tertentu. Keunggulan kontrol P adalah responnya yang sangat cepat terhadap perubahan. Namun, kontrol P memiliki kelemahan utama yaitu adanya offset atau penyimpangan permanen. Artinya, sistem tidak akan pernah benar-benar mencapai setpoint yang diinginkan, melainkan berhenti sedikit di atas atau di bawah setpoint. Inilah mengapa kontrol P jarang digunakan sendirian dalam aplikasi industri.
Kontrol Integral (I): Menghilangkan Error Permanen
Untuk mengatasi kelemahan kontrol P, ditambahkanlah komponen integral. Kontrol I bekerja dengan cara mengakumulasi error dari waktu ke waktu. Bahkan jika errornya kecil, selama error tersebut terus ada, kontrol I akan terus meningkatkan aksi kontrolnya secara perlahan namun pasti.
Kembali ke analogi AC, meskipun suhu ruangan sudah mendekati 25°C dan error menjadi sangat kecil, kontrol I akan tetap memberikan pendinginan tambahan hingga suhu benar-benar mencapai 25°C. Rumus kontrol integral adalah: I = (1/Ti) × ∫e(t)dt, di mana Ti adalah waktu integral.
Keunggulan utama kontrol I adalah kemampuannya menghilangkan offset atau steady-state error. Namun, jika konstanta integral terlalu besar, sistem bisa menjadi terlalu lambat dalam merespons perubahan. Sebaliknya, jika terlalu kecil, bisa menyebabkan sistem menjadi tidak stabil atau berosilasi.
Kontrol Derivative (D): Memprediksi dan Meredam Osilasi
Komponen terakhir adalah kontrol derivative, yang bekerja dengan cara menganalisis kecepatan perubahan error. Kontrol D pada dasarnya adalah seorang "peramal" yang mencoba memprediksi ke mana arah sistem akan bergerak berdasarkan tren perubahan error.Jika error berkurang dengan cepat (misalnya suhu ruangan turun dengan cepat mendekati 25°C), kontrol D akan mengurangi aksi pendinginan untuk mencegah suhu turun terlalu jauh di bawah setpoint (overshoot).
Sebaliknya, jika error meningkat dengan cepat, kontrol D akan memberikan aksi yang lebih agresif. Rumusnya: D = Td × de(t)/dt, di mana Td adalah konstanta waktu derivative. Keunggulan kontrol D adalah kemampuannya meredam osilasi dan mengurangi overshoot, sehingga sistem mencapai setpoint dengan lebih smooth dan stabil. Namun, kontrol D sangat sensitif terhadap noise atau gangguan pengukuran. Oleh karena itu, kontrol D tidak pernah digunakan sendiri, melainkan selalu dikombinasikan dengan P atau I.

Memahami Cara Kerja PID secara Keseluruhan
Ketika ketiga komponen P, I, dan D digabungkan, kita mendapatkan kontroler PID lengkap dengan persamaan: Output = Kp × e(t) + (Kp/Ti) × ∫e(t)dt + Kp × Td × de(t)/dt. Dalam praktiknya, cara kerja PID dapat dijelaskan melalui skenario berikut: Bayangkan sebuah tangki yang perlu dijaga levelnya tetap pada 50%. Sensor level mengukur kondisi aktual tangki dan membandingkannya dengan setpoint 50%. Jika level aktual 30%, maka error adalah 20%. Komponen P akan segera memberikan sinyal untuk membuka valve inlet sebesar, misalnya, 40% untuk menambah cairan dengan cepat.
Komponen I akan mulai mengakumulasi error 20% tersebut dan perlahan-lahan menambah sinyal pembukaan valve seiring waktu. Sementara itu, komponen D akan mengamati seberapa cepat level naik jika level naik terlalu cepat mendekati 50%, D akan mengurangi sinyal pembukaan valve untuk mencegah level melewati setpoint. Kombinasi ketiga aksi ini menghasilkan kontrol yang cepat (dari P), akurat tanpa offset (dari I), dan stabil tanpa osilasi berlebihan (dari D). Inilah mengapa PID menjadi standar industri yang digunakan dalam lebih dari 90% aplikasi kontrol proses.
Kombinasi Kontrol: PI, PD, dan Penyesuaian Lainnya
Tidak semua aplikasi memerlukan ketiga komponen PID secara bersamaan. Dalam praktiknya, engineer sering menggunakan kombinasi yang lebih sederhana sesuai kebutuhan:
Kontrol PI (Proportional-Integral) adalah kombinasi yang paling populer. Kontrol ini memberikan respons cepat dari P dan menghilangkan offset melalui I, tanpa kerumitan dan sensitivitas noise dari D. PI cocok untuk sistem dengan perubahan yang tidak terlalu cepat, seperti kontrol suhu atau level.
Kontrol PD (Proportional-Derivative) menggabungkan respons cepat P dengan kemampuan prediksi D untuk meredam osilasi. Namun, karena tidak ada komponen I, kontrol PD masih memiliki offset. PD biasanya digunakan dalam sistem yang memerlukan respons sangat cepat tetapi offset masih bisa ditoleransi, seperti dalam sistem positioning.
Kontrol P-only hanya menggunakan aksi proporsional saja. Meskipun paling sederhana dan paling cepat responnya, kontrol P-only memiliki offset permanen dan hanya digunakan pada aplikasi yang tidak kritis.
Dampak Kombinasi P, I, D pada Sistem
Ketika merancang sistem kontrol PID, seorang engineer harus memahami bagaimana setiap parameter mempengaruhi perilaku sistem secara keseluruhan. Inilah mengapa proses yang disebut "tuning" atau penyetelan parameter sangat penting. Meningkatkan nilai Kp (gain proporsional) akan membuat sistem merespons lebih cepat, tetapi jika terlalu besar bisa menyebabkan osilasi atau bahkan ketidakstabilan. Menurunkan Ti (waktu integral) akan mempercepat penghilangan offset, tetapi jika terlalu kecil bisa membuat sistem overshooting dan berosilasi.
Meningkatkan Td (waktu derivative) akan mengurangi overshoot dan membuat sistem lebih stabil, tetapi jika terlalu besar akan membuat sistem terlalu lambat merespons perubahan. Dalam industri, ada beberapa metode tuning yang telah teruji, seperti metode Ziegler-Nichols, metode trial-and-error, atau metode tuning otomatis menggunakan software. Setiap metode memiliki kelebihan dan kekurangannya sendiri, dan pemilihan metode bergantung pada karakteristik sistem dan tingkat akurasi yang dibutuhkan.

Contoh Respons Sistem dengan Grafik
Untuk memahami perbedaan perilaku masing-masing kontrol, bayangkan sebuah grafik respons step yaitu ketika kita tiba-tiba mengubah setpoint dari 0 menjadi 100. Dengan kontrol P-only, grafik akan menunjukkan respons yang cepat naik menuju setpoint, tetapi berhenti di sekitar 90-95, tidak pernah mencapai 100 (offset). Dengan kontrol PI, grafik akan naik lebih lambat dari P-only di awalnya, tetapi akhirnya akan mencapai 100 dan menetap di sana tanpa offset. Mungkin ada sedikit osilasi sebelum stabil.
Dengan kontrol PD, grafik akan naik cepat dan smooth tanpa overshoot yang signifikan, tetapi akan menetap pada nilai di bawah 100 (masih ada offset). Sementara dengan kontrol PID lengkap, grafik akan menunjukkan respons yang cepat, mencapai setpoint 100 tanpa offset, dengan sedikit atau tanpa overshoot, dan osilasi yang minimal. Grafik-grafik ini sangat penting dalam analisis sistem kontrol karena memberikan gambaran visual tentang bagaimana sistem berperilaku dan apakah parameter tuning sudah optimal atau perlu disesuaikan.
Penerapan PID dalam Kehidupan Sehari-hari
Meski terdengar teknis dan kompleks, PID sebenarnya ada di mana-mana dalam kehidupan kita. Sistem cruise control pada mobil menggunakan PID untuk menjaga kecepatan konstan. Termostat pada AC atau pemanas ruangan menggunakan prinsip kontrol PID untuk menjaga suhu ruangan. Bahkan drone yang dapat melayang stabil di udara menggunakan kontrol PID untuk mengatur kecepatan motor dan sudut kemiringannya.
Di industri, penerapan PID jauh lebih luas lagi. Pabrik kimia menggunakan PID untuk mengontrol suhu reaktor yang sangat kritis terhadap kualitas produk. Pembangkit listrik menggunakan PID untuk menjaga frekuensi dan tegangan listrik tetap stabil. Sistem pengolahan air menggunakan PID untuk mengontrol pH, level tangki, dan tekanan pompa.
Robot industri menggunakan PID untuk mengontrol posisi dan kecepatan pergerakan lengan robotnya dengan presisi tinggi. Bahkan dalam pengembangan self-balancing robot seperti segway atau robot beroda dua, PID memegang peranan krusial. Robot tersebut harus terus-menerus mengukur sudut kemiringannya dan menyesuaikan kecepatan motor roda agar tetap seimbang. Tanpa kontrol PID yang baik, robot akan langsung terjatuh. Semoga bermanfaat dan selamat berkarya!
PT. Karya Merapi Teknologi
Follow sosial media kami dan ambil bagian dalam berkarya untuk negeri!
Instagram: https://www.instagram.com/kmtek.indonesia/
Facebook: https://www.facebook.com/kmtech.id
LinkedIn: https://www.linkedin.com/company/kmtek
Sumber:


Comments